Topology summary
Continuous map
Definition
A function f:X→Y is said to be continuous if for each open subset V of Y, f−1(V) is an open set of X.
Let X, and Y be topologies. The followings are equivalent
- f:X→Y is continuous.
- for every closed set B of Y, f−1(B) is closed in X.
- f(A)⊆f(A) and f−1(B)⊆f−1(B) for A⊂X, B⊂Y.
- For each x∈X and each neighborhood V of f(x), there is a neighborhood U of x such that f(U)⊂V
- for a basis B of Y, f−1(B) is open in X.
Homeomorphism
Let X and Y be topological spaces; let f:X→Y be a one-to-one, onto, continuous, and the inverse function is continuous, then f is a Homeomorphism.
Let Sn be a n-dimensional sphere, p=(0,…,0,1) be the north pole. h:Sn−{p}→Rnbe the Stereographic projection is defined.
Space-filling curve
Let I=[0,1], there exists f:I→I×I such that this map fill up the entire square I2.
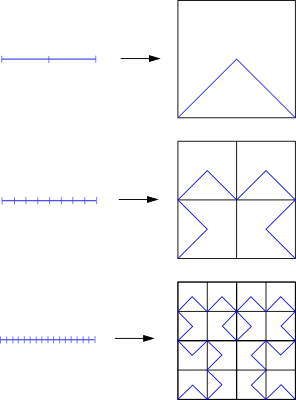
For m→∞limfm→f and d:(I2,I2)→R is distance, n→∞limd(fn,f)→0. and then since fn is a continuous, f is continuous.
A metric function
- d:X×X→R
- d(x,y)≥0, equality holds iff x=y
- d(x,y)=d(y,x)
- d(x,y)+d(z,y)≥d(x,y)
a set with a metric is called a metric space.
a distance between two functions is d(f,g)=t∈[0,1]sup∣f(t)−g(t)∣
if A is a subset of X, the real-valued function d(x,A) is defined to be the infimum of d(x,A) where a∈A and is continuous.
Tietze extension theorem.
Any real valued continuous function on a closed subset of a metric space may be extended to a real-valued continuous function on the whole space.
Compact spaces
Definition
Let A be a collection of open subsets of space X. A is called an open cover of X such that ⋃A=X. and A′ is called a subcover of A if A′ is a subcollection of A and ⋃A′=X.
A space X is said to be compact, if all open cover of X has a finite subcover.
Other defintion of a compactness in terms of closed subsets
- If X is compact, for every collections C of closed sets ca with ⋂ca=∅, C has a subcollections {C1,…,Cn} such that ⋂i→1nCi=∅.
- X is compact. ⇒ C is a collection of closed sets of X such that for all finite subcollection {C1,…,Cn}, ⋂i→1nci≠∅. then for every collection C, ⋂a∈AllCa≠∅.
Heine-Borel theorem
A closed interval of the real line is compact.
Connectedness
Definition
A space X is connectedness if when we write X as union A∪B of two nonempysubsets, then A¯∩B≠∅ or A∩B¯≠∅. in other words, X is not seperated by disjoint nonempty open subsets.
Examples
- A indiscrete topology is a connected space.
- The real line is a connected space.
- A rational C is not a connected space.
component
a component of topology X is a maximal connected subset of X. so if a space is not connected then it is seperated by any components.
joinning poins by path
Given x,y∈A, A path in the topological space A is a continuous function f:[a,b]→A such that f(a)=x, f(b)=y. and A space A is said to path connected if any two of its points can be joined by a path.
Examples
- the continuous image of path-connected space is path-connected.
- Sn(n sphere) is path-connected for n>0.
- the product of two path-connected space is path-connected.
- any indiscrete space is path-connected.
Homotopic map
Definition
Let X,Y be topological spaces.Let f,g:X→Y are continuous. f is homotopic to g if there exists F:X×[a,b]→Y such that F(x,0)=f(x) and F(x,1)=g(x) for all points x∈X.
and this continuous map F be called homotopy from f to g .